Minden korábbinál gyorsabb tanulásra lehetnek képesek a Toyota robotjai
Kevesen tudják, hogy a részben vagy teljesen elektromos meghajtások mellett a Toyota vezető szerepelt tölt be a mesterséges intelligencia és a robotika területét érintő fejlesztések tekintetében is. Ezeknek a területeknek nem csupán az jövő önvezető autóiban (és az autonóm autózás előszobájának tekintett aktív biztonsági és vezetéstámogató rendszerekben) van kiemelt szerepe, hanem a tervezési és gyártási folyamatok optimalizálásában is. A jövőképében önmagát a világ vezető mobilitási szolgáltatójaként definiáló vállalat innovációs tevékenységét vezető Toyota Research Institute (TRI) ezúttal olyan technológiát fejlesztett ki, amely forradalmasíthatja a robotok tanulási folyamatát. Az új mesterséges intelligencia alapú diffúziós politika lehetővé teszi a robotoknak, hogy egyszerű utasítások alapján tanuljanak meg több mint 60 kézügyességi feladatot anélkül, hogy új kódot írnának. Az érintés érzékelése kulcsfontosságú ebben a folyamatban, amely lehetővé teszi a robotok számára az interakció révén történő tanulást. A TRI célja az, hogy a robotoknak 1000 új készséget tanítson meg 2024 végéig. Az új technológia sebessége és megbízhatósága jelentős lépést jelent a robotok hatékonyabbá tételében, és hozzájárul a mindennapi életünk megkönnyítéséhez.
Nem, a robotok nem veszik át a világuralmat. Ugyanakkor hamarosan elég okosak lehetnek ahhoz, hogy átvegyék az olyan egyszerű, hétköznapi feladatokat, mint például a főzés. És ez a „hamarosan” talán még hamarabb eljön majd a Toyota Research Institute robotikusai által a tanulási technológiában elért új áttörésnek köszönhetően.
Mérföldkőnek számító új technológia
A TRI Robotics laboratóriumaiban dolgozó tudósok egy csoportja azon dolgozik, hogy a robotokat úgy fejlessze, hogy azok – a Mobilitás mindenkinek szellemében – képesek legyenek az embereket támogatni. Legújabb fejlesztésük pedig egy olyan, mérföldkőnek tekinthető technológia, amely sokkal okosabbá és segítőkészebbé teszi a robotokat. Ez a fejlesztés egy mesterséges intelligenciára épülő diffúziós politikán alapul, és egyszerűbben fogalmazva lehetővé teszi a robotok számára, hogy gyorsabban tanulják meg az új készségeket. A technológia jelentős lépés a robotok számára kifejlesztett „nagy viselkedési modellek” (Large Behavior Models, LBM) felé, ugyanúgy, ahogyan a „nagy nyelvi modellek” (Large Language Models, LLM) nemrégiben forradalmasították a társalgási mesterséges intelligenciát.
Bővülő tanulási képesség
A korábbi módszerekkel ellentétben, amelyek lassúak voltak és csak bizonyos feladatokra korlátozódtak, ez a megközelítés már lehetővé tette a TRI-nél dolgozó tudósok számára, hogy egyetlen sor új kód megírása nélkül több mint 60 kézügyességi feladatot tanítsanak meg a robotoknak. A TRI célja, hogy ezt a képességet tovább bővítse, és az év végére több száz, 2024 végére pedig 1000 új készséget tanítson meg.
„Ez az új tanítási technika egyszerre nagyon hatékony és nagyon magas teljesítményű viselkedéseket eredményez, lehetővé téve a robotok számára, hogy sok tekintetben sokkal hatékonyabban erősítsék az embereket.” – avat be Gill Pratt, a TRI vezérigazgatója és a Toyota vezető tudósa.
Új készség kevesebb mint egy nap alatt
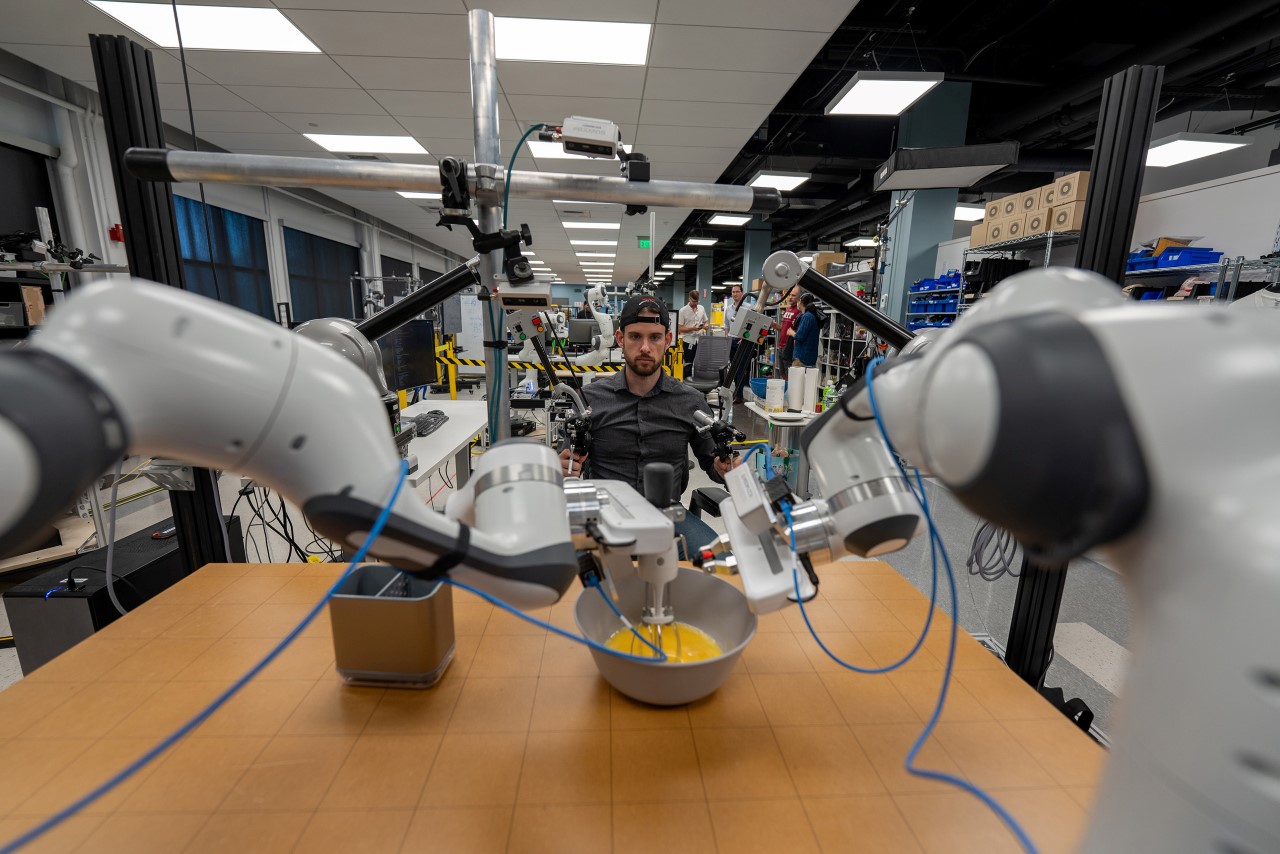
Így működik ez a való életben. Egy ’tanár’ egy távműködtető rendszer segítségével utasít egy robotot bizonyos cselekvések végrehajtására, lényegében egy kis készségkészlet bemutatásával. Ez jelenti a folyamat kezdetét. Ezután a mesterséges intelligencián alapuló diffúziós politika több órán át szívja magába az információkat, és a háttérben finomítja a robot képességeit. Jellemzően a robot tanítása délután történik, a tanulási folyamat pedig egy éjszaka alatt. Amikor a csapat reggel visszatér, a robot képes végrehajtani az éjszaka során megtanult új viselkedési formákat.
Tanulás az érintésen keresztül
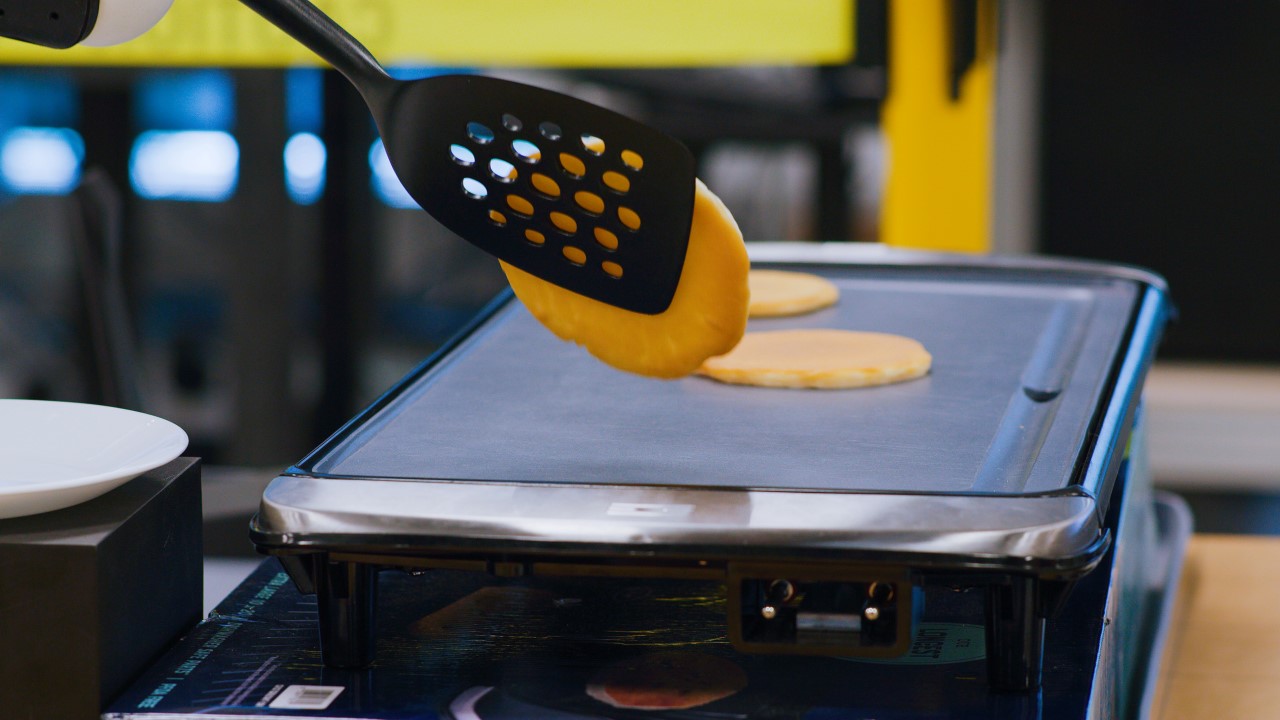
Az érintésérzékelés létfontosságú szempont ebben a tanulási folyamatban. Ahogy az emberek is jobban tanulnak az érintés és az interakció révén, úgy a robotok is nagy hasznát veszik ennek. Egy haptikus eszköznek köszönhetően, amely a tanító számára az érintés érzékét szimulálja, a robotok mostantól a környezetükkel való interakció révén tanulhatnak és fejleszthetik képességeiket. Ellenkező esetben nehezen tudnák hatékonyan végrehajtani a feladatokat. Ha érintés útján tud interakcióba lépni a környezetével, akkor sikeressé válik különböző műveletek végrehajtásában, például egy palacsinta megfordításában, ami jól mutatja az érintés beépítésének erejét a tanulási folyamatba.
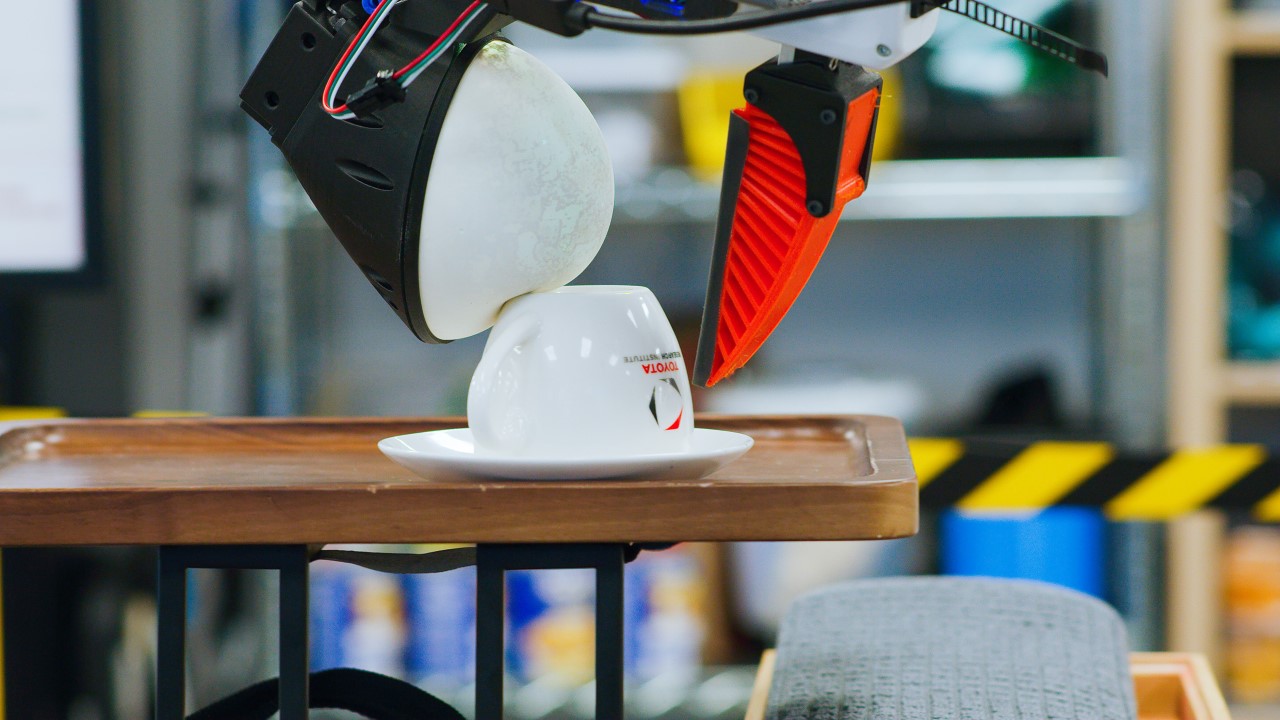
„Ami annyira izgalmas ebben az új megközelítésben, az az a sebesség és megbízhatóság, amellyel új készségeket tudunk hozzáadni. Mivel ezek a készségek közvetlenül a kameraképek és a tapintásérzékelés alapján, kizárólag tanult reprezentációkat használva működnek, még olyan feladatokban is képesek jól teljesíteni, amelyek deformálható tárgyakat, ruhát és folyadékot tartalmaznak – ezek mindegyike hagyományosan rendkívül nehéz feladatot jelentettek a robotok számára.”- árulja el Russ Tedrake, a TRI robotikai kutatásért felelős alelnöke.
Arról, hogy hogyan történik a robotok tanítása, az alábbi linken tekinthető meg videó: Teaching Robots New Behaviors (youtube.com)
Cikk megosztása